CFD & FSI-RG
Computational Fluid Dynamics &
Fluid Structure Interaction
Research Group
qing.xiao@strath.ac.uk +44 (0)141 548 4779
Computational Fluid Dynamics &
Fluid Structure Interaction
Research Group
qing.xiao@strath.ac.uk +44 (0)141 548 4779
Numerical Simulations on an Articulated Fish-Like System
The research on fluid dynamics of biomimetic is a challenging problem due to the complex hydrodynamic mechanisms of real aquatic animals. Although there are existing investigations on the fish swimming mechanisms by establishing the numerical and experimental models with typical kinematic motions, the understandings are still limited on the fish body internal forces and response to external forces. Inspired by the previous work of Kanso (2005) and Eldredge (2008) on the propulsion study for an articulated multi-segment system, we successfully developed a numerical strategy for simulating the fish body consisting multi-segments based on a method of coupling the Computational Fluid Dyanmics (CFD) and Multi-Body Dynamics (MBD).
The studies on the propulsion and maneuvering abilities provide essential insight for the design of swimming robots and AUV, and the research results will obviously contribute on the methodologies improvements and biomimetic understanding of internal and external forces response mechanisms.
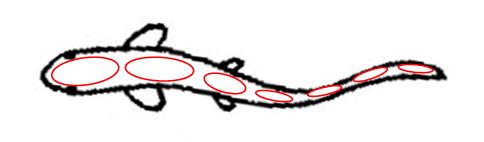
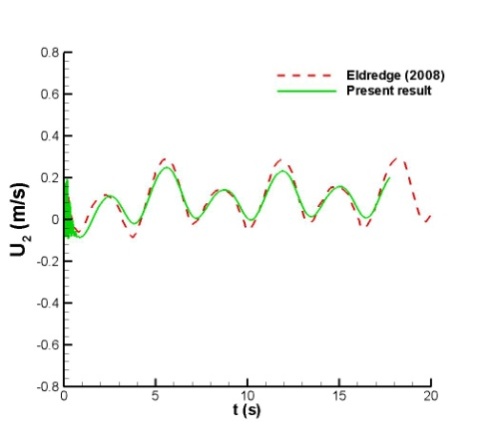
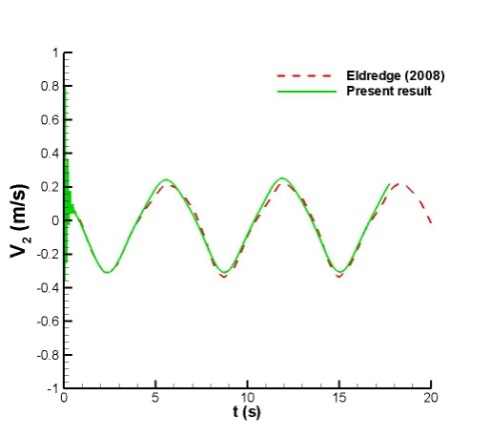
With the use of this multi-element system to emulate fish body rather than using one specified travelling wave along body (Figure 1), the replication of the multiple degrees of freedom of real fish body along with the body internal inertial forces becomes feasible. The preliminary validation result in Figure 2 presents the feasibility and reliability of the in house code. The research interest is further developed on an integrated analytical-simulation frame work to model multi-segments robots, Amphibot III (Figure 3), by collaborating with the robotic team in Institut de Recherche en Communication et Cybern��tique de Nantehas (IRCCyN). The task is to incorporating the dynamic model in Amphibot III into CFD codes, and the expected results can be seen as: a) visible flow field around the robot; b) detailed comparison and validation between CFD results and LAEBT analytical results.

Copyright © 2014 - All Rights Reserved - University of Strathclyde CFD & FSI-RG